A reconstructed surface is defined in terms of the underlying bulk coordinates, \(\{\vec{a}_i \}\). The diperiodic lattice of surface atoms can be defined by a set of unit vectors, \(\{ \vec{c}_i\}\). A matrix operation, \(\vec{P}\), can be performed such that
\[\left(\begin{array}{c} \vec{c}_1 \\\vec{c}_2\end{array}\right)=\vec{P}\left(\begin{array}{c} \vec{a}_1 \\\vec{a}_2\end{array} \right) =\left( \begin{array}{cc}P_{11} &P_{12}\\P_{21}&P_{22} \end{array}\right)\left(\begin{array}{c} \vec{a}_1 \\\vec{a}_2\end{array}\right).\]
Here, \(\vec{a}_1\) and \(\vec{a}_2\) are separated by an angle \(\phi_1\), and \(\vec{c}_1\) and \(\vec{c}_2\) are separated by an angle \(\phi_2\). When \(\phi_1=\phi_2\) the reconstructed surface can be identified by the notation,
| \[\left( \frac{\vec{c}_1}{\vec{a}_1}\times \frac{\vec{c}_2}{\vec{a}_2}\right)R\alpha \] | (1.9) |
where \(R\alpha\) represents a rotation of the respective coordinate systems through an angle, \(\alpha \). The value of the angular rotation is typically omitted since, for example, a \(\sqrt{3}\times \sqrt{3}\) reconstruction[1][2] is generally rotated through an angle of \(30^\circ \).
To label the type of adatom used to form the reconstruction, the notation of Si{111}, for example, is typically written \(X\)/Si{111}\(\sqrt{3}\times \sqrt{3}\), where \(X\) represents the adatom (e.g. B, Al, Au, Ag, etc).
Figure 1.9: Mathematical Reconstruction of \(1\times 1\) to \(\sqrt{3}\times \sqrt{3}\) Surface. a) The underlying substrate layer forms \(1\times 1\) diperiodicity. Note that each atom has one free dangling bond. b) Once ~30 ML of group III adatoms is deposited, the diperiodicity becomes \(\sqrt{3}\times \sqrt{3}\). |
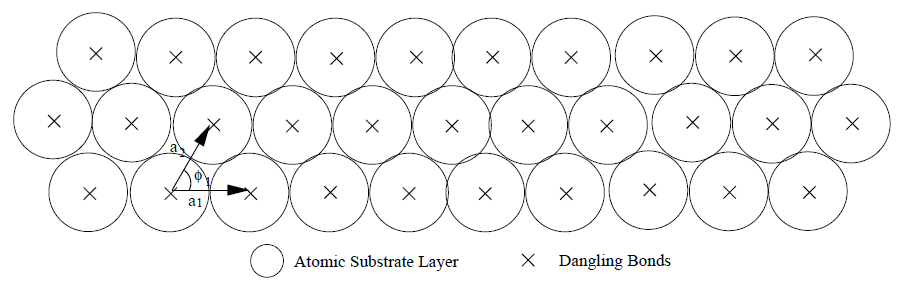
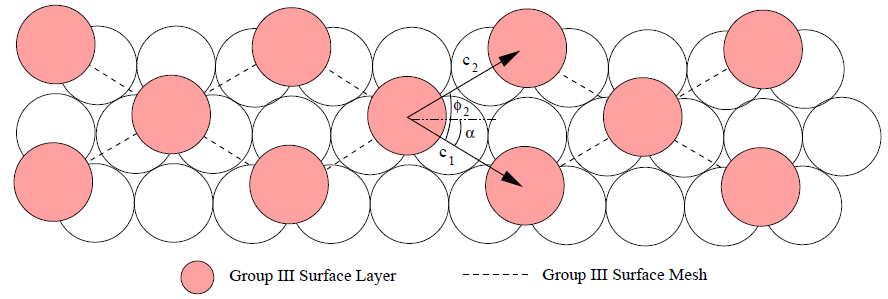
Consider a simplified \(1\times 1\) substrate lattice, (Fig. 1.9a). 0.3 ML of adatoms forms a surface layer such that each adatom bonds with three substrate atoms (Fig. 1.9b). The diperiodic surface unit vectors, \(\{\vec{c}_i \}\), of this reconstructed surface of adatoms can be expressed in terms of the primitive unit vectors, \(\{\vec{a}_i\}\), of the bulk.
In Fig. 1.9, \(\phi_1\) lies between the bulk unit vectors, \(\{\vec{a}_i\}\), \(\phi_2\) lies between the surface unit vectors, \(\{\vec{c}_i\}\), and \(\alpha\) is the angle through which \(\{\vec{c}_i\}\) are rotated with respect to \(\{\vec{a}_i\}\).
Geometrically
$$\begin{array}{rclcrcl} c_1 \sin\alpha &=& \frac{\large{a_1}}{\large{2}}\tan\phi_1 &&c_2 \sin\alpha &=&a_2\sin\phi_1\\ c_1&=&\frac{\large{a_1}}{\large{2}}\frac{\large{\tan(\pi/3)}}{\large{\sin(\pi/6)}} &&c_2&=&a_2\frac{\large{\sin(\pi/3)}}{\large{\sin(\pi/6)}}\\ &=&\frac{\large{a_1}}{\large{2}}\sqrt{3}\cdot2&&&=&a_2\frac{\sqrt{3}}{2}\cdot2\\ &=&\sqrt a_1&&&=&\sqrt{3}a_2 \end{array}.$$
With these values for \(\{\vec{c}_i\}\), the notation (1.9) becomes
\[\left(\sqrt{3}\times\sqrt{3}\right)R30^\circ.\]
This is sometimes simply labeled "\(\sqrt{3}\times\sqrt{3}\)''.
References
- , “Observation and structural determination of (√3×√3)R30° reconstruction of the Si(111) Surface”, Phys. Rev. Lett., vol. 62, 1989.
- , “Structure determination of the Si(111):B(√3×√3)R30° surface: subsurface substitutional doping”, Phys. Rev. Lett., vol. 63, no. 12, 1989.